Hand Gesture Controlled WiFi Robot
Welcome to our new DIY series – Spinel Crux – A DIY Advanced Hand Gesture Control Robot using Raspberry Pi for Wireless Surveillance Project.
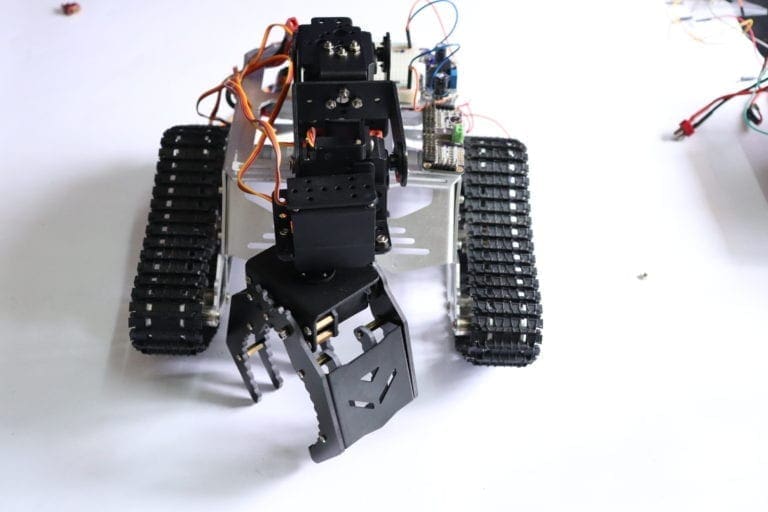
Yes, of course, building and tinkering with a DIY robot is fun. In this series, we will build a Raspberry Pi Rover Robot which can travel through rough terrain and control using hand gestures.
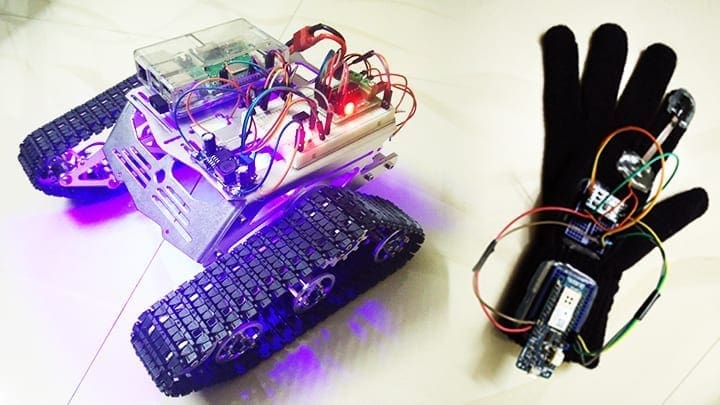
To drive this Telepresence Robot we will be using a control glove which acts as a gesture sensor. The gesture sensor will have an accelerometer and a flex sensor to control the status and the direction it should move. The flex sensor activates the Spinel Crux and the tilt of the accelerator determines the direction it should move. And yes, there is a robot building kit available for you to build one yourself.
Hand Gesture Controlled Robot for Wireless Surveillance Demo
Now just for a taste, watch the Demo Video of the Spinel Crux – The DIY Gesture Controlled Robot. In this demo video, we show you how you can control the robot using just hand gesture.

Click the Subscribe YouTube button below for Demo and Complete Tutorial
In this video series, we will explain everything about this gesture control WiFi Robot, controlling it with the hand gesture using the gesture sensor control glove and will show you how to make one yourself.
We will provide you with the design, code of the gesture-controlled robot and links to all the products used in this project including the robot building kit.
How does this Gesture Controlled Robot Work?
We build a control glove to control the WiFi Robot using hand gestures which will act as a gesture sensor. We use Raspberry Pi and Arduino to create our Gesture Controlled Robot. Arduino to make the control glove, which will detect the hand gestures and send the data to Spinel Crux via WiFi.
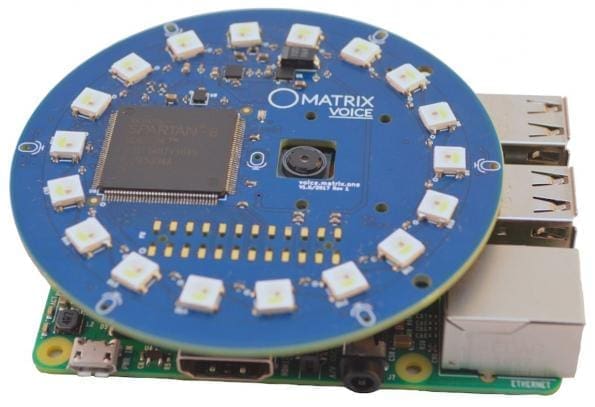
We use a Raspberry Pi to make the Robot, which will receive the data sent from the Arduino, process them and control the bot.
Tutorial on building the Gesture Controlled Robot using Arduino and Raspberry Pi will be available in our YouTube channel as well as our website. So make sure you SUBSCRIBE this channel by clicking this subscribe YouTube button below for future videos.
How to Make your Own Gesture Control Robot Tutorial
Part 1 – Spinel Crux – The Controlling Glove
Spinel Crux – Gesture Controlled Robot for Wireless Surveillance – Tutorial Part 1
Part 2 – Spinel Crux – The Robot
Spinel Crux – Gesture Controlled Robot for Wireless Surveillance – Part 2
Subscribe RootSaid Website by simply entering your Email ID below. You will receive notification whenever a new project is available for you to tinker with.
[mc4wp_form id=”1842″]
Rate the Project
Did you find this useful? Help us to improve by rating this page.



Awesome project,full of innovation
Hey,
I’m trying to do the wiring setup for the robot part but there is no circuitry or anything under the tutorial. Can you please help?